
【ROS2笔记00】总结
01 Why ROS2
机器人是一个高度复杂的系统性实现,模块化分工是提高开发效率的最合适的策略。如何将各模块结合,那就需要一套通用的框架,即 Robot Operating System,以提升“可插拔”的功能模块的复用性。
ROS1 和 ROS2 的对比如下:

对比如上,如果觉得ROS2可以继续用。那么还有一个选择 ROS2 的理由:ROS1 都要被淘汰了,即将在2025年后停止维护。不用 ROS2 用什么?
另外需要注意的是,ROS虽然字面意思是机器人操作系统,但是它并非经典意义上的操作系统,更准确地讲ROS是一个 SDK (Software Development Kit),即软件开发工具包。
ROS2的精髓:
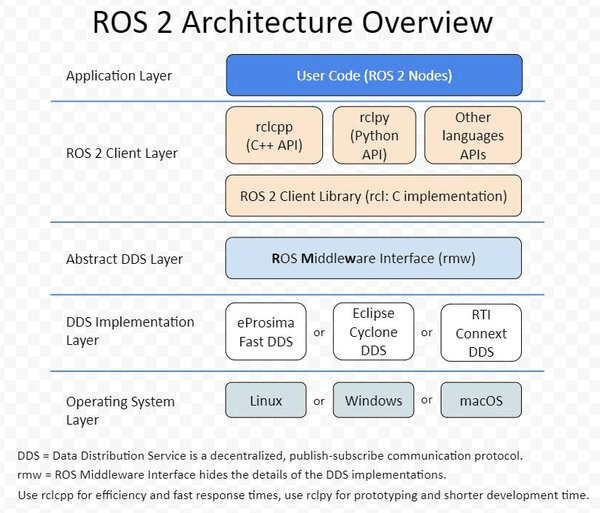
ROS2 系统架构:
02 框架
1.1 环境搭建
ROS2安装与开发环境搭建(版本为humble,基于Ubuntu22.04):
功能包构建工具 colcon 的安装与使用:
1.2 通信机制
1.3 Launch
1.4 坐标变换
1.5 可视化
03 项目
官方 Tutorial:https://github.com/ros/ros_tutorials
1 | git clone git@github.com:ros/ros_tutorials.git -b humble |
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 咕咕评客!
 wechat
wechat alipay
alipay
相关推荐
评论